Tenemos mapas precisos de la luna, Marte y otros planetas. Pero apenas conocemos nuestros propios océanos. La creación de mapas del fondo marino nos permite comprender mejor nuestro planeta y la vida que habita estos lugares inexplorados. Actualmente, los robots submarinos se utilizan para mapear con precisión el lecho marino, pero este tipo de sistemas aún es muy cara de construir y operar, lo que limita la exploración oceánica.
La construcción de mapas precisos (terrestres o submarinos) requiere sensores precisos, pero también el conocimiento preciso de la posición del sensor — es como hacer un rompecabezas donde se requiere saber exactamente dónde ubicar cada pieza. Pero medir la posición de nuestro robot es un problema difícil bajo el agua debido a dos razones principales: primero, la señal de GPS o un sistema de posición no está disponible bajo el agua debido a la alta atenuación de señales electromagnéticas en el agua. En segundo lugar, los sensores de navegación que se utilizan actualmente son caros, requieren grandes cantidades de energía y son relativamente grandes.
Navegación de Bajo Costo
Actualmente utilizamos en nuestros robots sensores de actitud de alta precisión basados en giroscopios y acelerómetros de fibra óptica, pero como parte de esta expedición también estamos trabajando en sistemas inerciales de bajo costo, los mismos que puede tener en su teléfono móvil. Este tipo de sensores son menos confiables y precisos debido al mayor ruido y los cambios en los parámetros internos que requieren complejos procedimientos de calibración. Pero estamos desarrollando nuevos algoritmos para hacerlos más confiables sin intervención humana para usarlos en la navegación submarina y permitir sistemas de creación de mapas del fondo marino más baratos en el futuro. Si queremos explorar el océano, necesitamos robots menos costosos que pueden durar más usando menos energía.
Uno de mis objetivos de investigación para la expedición actual era montar un sensor de inercia de bajo costo con el sistema. Además de los sensores inerciales de alta precisión y alta precisión que cuestan más de 100k USD, tenemos sensores inerciales de bajo costo que cuestan 100 veces menos. Así que ahora podemos comparar nuestros algoritmos y probar nuevos métodos. Esperamos en el futuro contar con robots submarinos rentables que nos permitan explorar el océano y ayudar a comprender mucho mejor nuestro propio planeta.
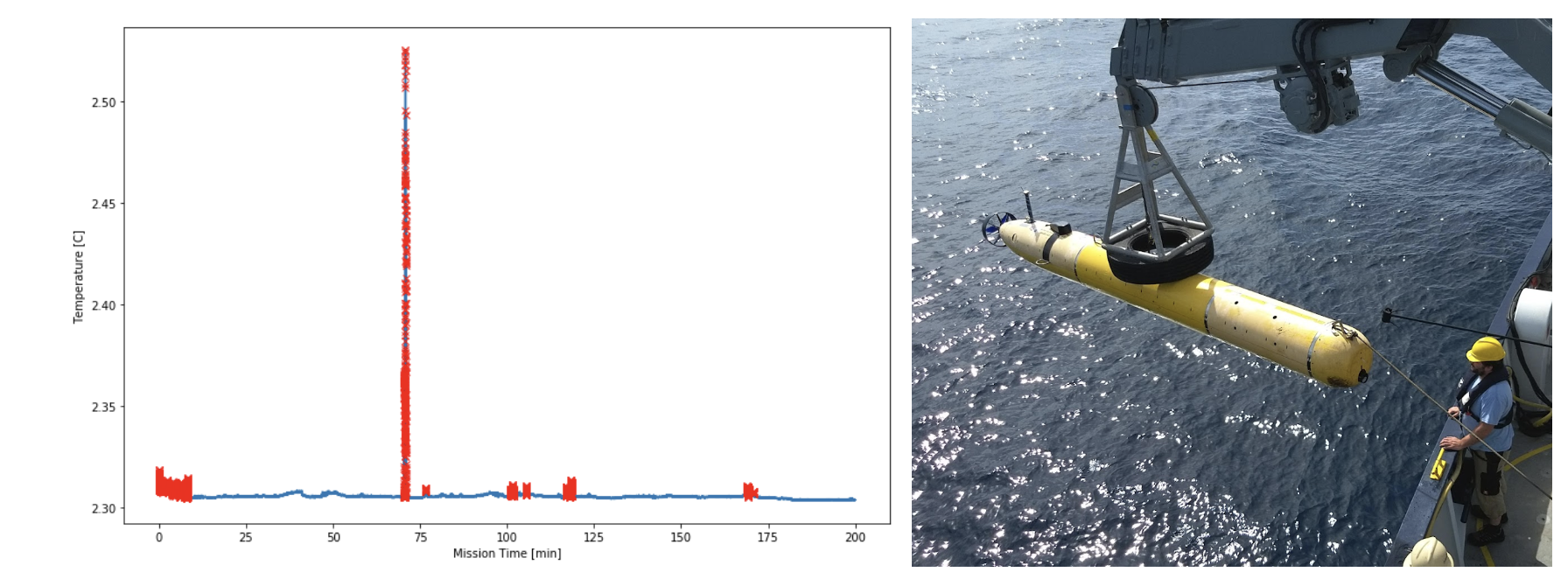
¡Anomalías de temperatura y caza de chimeneas!
Realmente disfruto estar en el mar y es emocionante porque siempre hay oportunidades para descubrir. En 2015, formé parte de la expedición MBARI del Golfo de California cuando encontramos algunas anomalías inusuales en el mapa del fondo marino. Una serie de montículos que se elevan desde el fondo marino nos llevan a creer que los respiraderos hidrotermales estaban en esta área. No sabíamos si en realidad eran respiraderos hidrotermales o si todavía estaban activos. Más tarde, después de procesar los registros de temperatura del vehículo y darme cuenta de que también observamos anomalías de temperatura, estábamos completamente seguros.
Ahora hemos utilizado el mismo AUV para mapear el fondo marino en las áreas circundantes del campo descubierto anteriormente. Nuevamente, hemos encontrado evidencia de ventilación hidrotermal en la batimetría y anomalías de temperatura que llevan a descubrir un nuevo campo de ventilación hidrotermal en el área.