There is a great need to increase the efficiency of marine research. Building global ocean mapping infrastructure is difficult given the financial costs and human effort required in traditional oceanographic technology. Remote sensing technology (such as multibeam sonar and satellite imagery) is insufficient on its own as it cannot penetrate past the ocean surface. Robotics models that have traditionally been used exclusively on solo missions are relatively limited in scope. Understanding our Oceans poses technological challenges, but Dr. Oscar Pizarro, of the Australian Center for Field Robotics at the University of Sydney, choses to see this as an opportunity.
In January, a group of engineers, roboticists and oceanographers from Woods Hole Oceanographic Institution, Massachusetts Institute of Technology, University of Rhode Island, and University of Michigan will come together, working to develop a new cost-effective and efficient underwater robotics program. The ultimate goal of the research is the development of autonomous ocean mapping systems capable of scaling up in a cost-effective manner. Expanding from the 2015 Coordinated Robotics that took place in the Timor Sea region, the time the team will come together again off Maui, Hawaii, exploring the the ‘Au’Au Channel and its coral reef system. The 21-day expedition will be dedicated to the goal of characterizing the distribution distribution of reefs by deploying a fleet of autonomous vehicles using automated planning and scheduling tools.
Advancing the Field
The team will test various technologies and gather observations related to several challenges in robotics and machine learning. By developing a group of cooperative, unmanned underwater vehicles, researchers aim to increase the quality and efficiency of data collection and analysis, ocean mapping, and predictive habitat modeling. The different vehicles have varying specialties, including optical imaging, acoustic mapping and water column sampling. Robot-gathered data combined with an interdisciplinary approach stands to advance goals such as detailed mapping of the ocean floor, as well as improve our understanding of the relationships between bathymetry and quantitative habitat information.
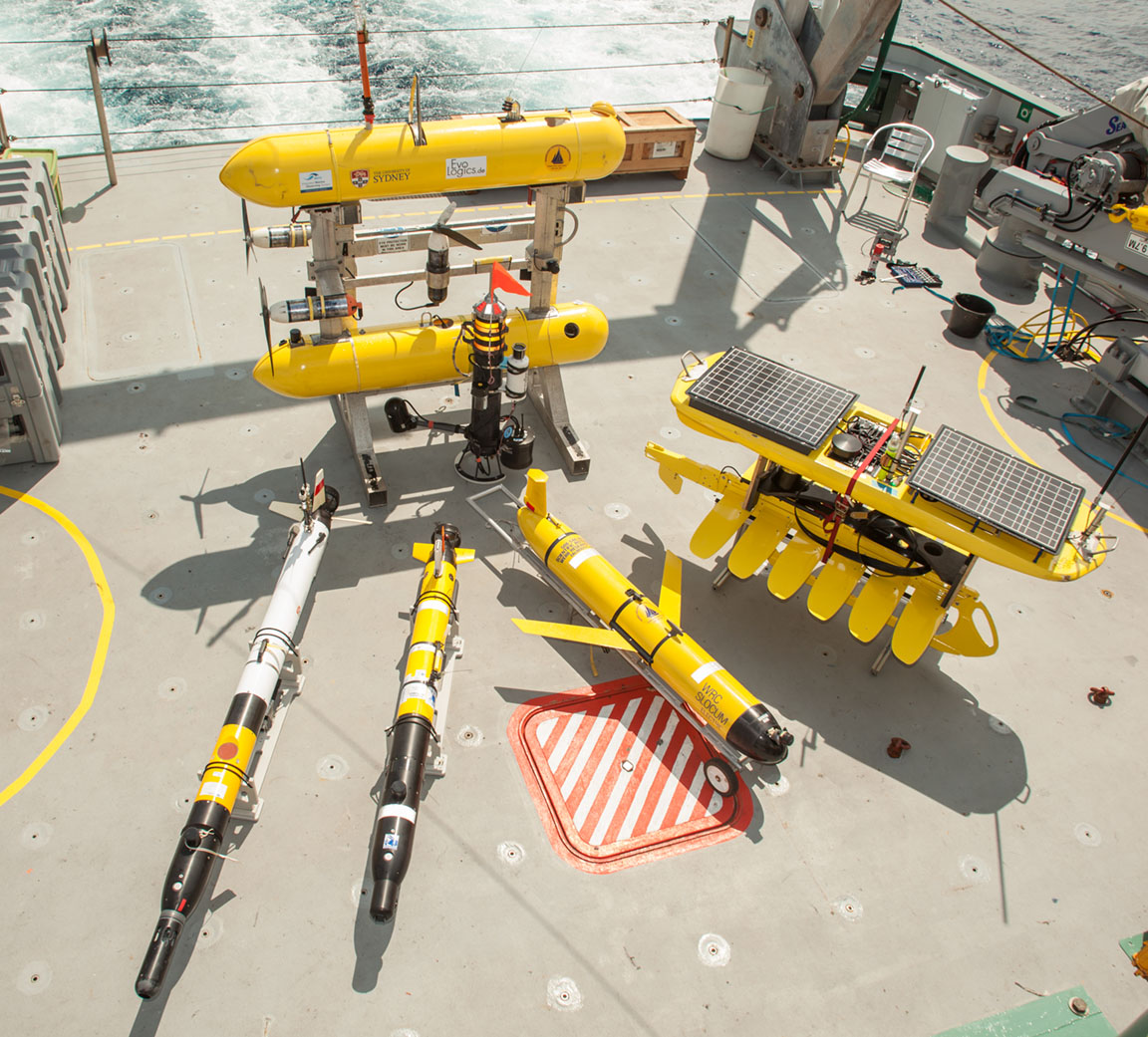
Unmanned models like Sirius and NextGen autonomous underwater vehicles (AUV’s) will be employed as mapping vehicles to build improved habitat models over large areas. Smaller, drifting imaging platforms will complement these larger models by targeting smaller areas with simpler and more frequent deployments. The AUVs will be able to coordinate their own routes, share data, and communicate with each other using acoustic modem technology. The amount of data collected from the AUVs will be extensive, and must be organized and analyzed in such a way that provides scientific insight. As a human team could not possibly accomplish this in a quick and cost effective manner, the data processing will mostly be automated, some of it running on the AUVs.
Small-Scale Investigation with Long-Term Goals
This research will create a framework for multiple vehicles operating at the same time and in the same space. Mastering this complex assemblage will markedly improve the ability to effectively gather data for high-level characterization of marine environments and guiding autonomous survey planning. The focus on high level automation of multi-robotic cooperative planning and marine ecosystem characterization will allow for the development of new methodologies and advance high levels of autonomy in multiple vessel procedures.
While the waters of the ‘Au’Au Channel may be relatively healthy, they are not immune to warmer temperatures and coral bleaching. This integrated reef ecosystem includes some of the most extensive and diverse mesophotic coral ecosystems in the world. Creating detailed maps and habitat models of the ocean floor and coral system will achieve a better understanding of coral bleaching impacts on a small-scale, while simultaneously testing the robotic programs functionality and contributing towards the long-term goal of engineering a global ocean mapping infrastructure.
Mapping a Future
The team chose this particular system as a research location for an additional reason: connected to its ecological importance as a reef system, the channel represents an ideal environment for testing multiple vehicles due to its wide-ranging environment that has been subject to extensive research using older, remote sensing technology. This will allow the scientists to both build upon information collected from prior research efforts and refine their own models comparatively.
The development of an autonomous global ocean mapping system has enormous potential. Pizarro and his team are confident that such a system would provide a greater body of knowledge to scientists as well as the general public. Due to the work of their integrated vehicles, improved detail and quality of data will allow scientists to build better habitat models and make more accurate predictions about the condition of underwater environments. This has positive implications for the study of climate change, improving our ability to monitor ocean environments under warming conditions. Additionally, this project has great promise as a tool for education, providing increased access to the beautiful imagery of the ocean floor and coral reefs, as well as its constantly changing conditions.



The MapTracker below is a tool that allows you to visually track the multi-vehicle operations, while observing their status and tasks – all in real time.











Data & Publications
The resulting shipboard dataset is being archived at Rolling Deck to Repository and is now available.
ADCP data is curated and archived by University of Hawaii.
- 30 day Preliminary Cruise Report: Coordinated Robotics Part 2
- Pizarro, O. (2019). Autonomous Benthic Monitoring in Australia. Invited Presentation at Norwegian University of Science and Technology (NTNU), Trondheim, Norway.
- Pizarro, O. (2019). Autonomous Benthic Monitoring in Australia. Invited Speaker at University of Porto, Port, Portugal.
- Pizarro, O. (2019). Benthic Imaging and Mapping Assisted by Autonomous Machines. Oral Presentation at Marine Imaging Workshop, Victoria, British Columbia, Canada.
- Pizarro, O. (2019). Field Trials of Multi-vehicle Adaptive Robotic Surveys for Seafloor Mapping and Characterization. Oral Presentation at Geohab Conference, St. Petersburg, Russia.
- Williams, S. (2019). Challenges in Deploying Robust Autonomy for Robotic Exploration in Marine Environments. Oral Presentation at International Conference on Robotics and Systems' Workshop on Informed Scientific Sampling in Large-scale Outdoor Environments, Macau, China.
- Williams, S. (2019). Challenges in Deploying Robust Autonomy for Robotic Exploration in Marine Environments. Oral Presentation at Pacific International Maritime Conference, Sydney, Australia.
- Williams, S. (2019). High-resolution Imaging in Marine Habitats Using Autonomous Underwater Vehicles. Oral Presentation at Building Transparent Global Oceans Community Workshop, Qingdao, China.
- Williams, S. (2019). Marine Surveillance and Undersea Autonomy. Oral Presentation at Defence Innovation Network Workshop on Marine Surveillance and Undersea Autonomy, Wollongong, Australia.
- Williams, S. (2019). Robots in the Wild: Challenges in Deploying Robust Autonomy for Robotic Exploration. Oral Presentation at Robotics: Science and Systems Robots in the Wild Workshop, Freiburg, Germany.
In the News
Solving the Sky-High Costs of Ocean Exploration with A.I.
Oceans Deeply • February 9th, 2018
NextGen AUV trialled in Hawaii as part of a coordinated robotics expedition
IMOS News • April 10th, 2018