Some years ago, Prof. Stefan Williams, from the University of Sydney’s marine robotics program, packed two of his underwater vehicles and traveled to Greece. He was excited to participate in the practical applications of the robots he and his team had been developing for years. There, the team was involved in the mapping of a first century BC shipwreck, building high resolution models of the seafloor. With the information, Archaeologists were able to plan their excavations, which yielded several interesting findings. They discovered, amongst other things, part of a large statue, and a nearly complete human skeleton buried in the sediments, 2000-year-old remains of a member of the sunken crew.
This melding of engineering and science is what drives Prof. Williams. “To me, it’s very nice to be the interface. Looking at new developments in vehicle technology, taking machine learning and applying it to the huge volumes of data that we collect,” he says, “to help scientists better understand the marine environment, whether it is for environmental purposes or archaeology or geoscience. Marrying engineering with scientific discovery is an exciting place to work.”

The Offspring
For the Coordinated Robotics expedition, the Australian team has packed a serious amount of gear and technology. The different robots they have brought with them are all capable of acquiring roughly the same kind of data, but there are several factors that make each one unique and suited to perform better in different work conditions.
Autonomous Underwater Vehicle (AUV) Sirius is the big brother. The team bought it from Woods Hole Oceanographic Institution twelve years ago, and has taken it around the world since. Sirius can hover and navigate relatively rough terrain, operate for up to 8 hours, and collect reasonably high resolution stereo imaging data. While flying, it measures temperature, salinity, and water quality (by detecting dissolved organic matter, turbidity, and fluorescence). Sirius also has a multibeam sonar and a ADCP current profiler. However, one of limitations is its size: It weighs 250 kg, which demands a big ship for its deployment.
This gave the team enough reason to begin working on their newest creation, temporarily called NextGen. “We have a brand new AUV which has capabilities that are somewhere in between Sirius and the Iver, which is capable of hovering and sitting and working over rough terrain,” Prof Williams explains. “The new AUV is smaller than Sirius and easier to deploy, but it is brand new, so we have to make sure that all the subsystems are working, including checking what the data quality is like.” The new vehicle has all of those capabilities, yet at about 100 kg, it has no need of a ship as large as Falkor to be deployed.
Then there’s the Iver, the simplest vehicle in the family. “The Iver is smaller. It weighs about 35 kg, so it can be deployed from a small boat. One or two people can lift it in and put it in the water. It is torpedo shaped with fins.” One of the Iver’s limitations is that it can’t hover, only move forward. “Because of this, it is not well suited for very rough terrain with cliffs or obstacles,” Prof Williams explains. “It is faster, it has better resolution cameras than Sirius, it can cover more ground, so if it’s relatively flat, we can cover a lot more ground with it.”
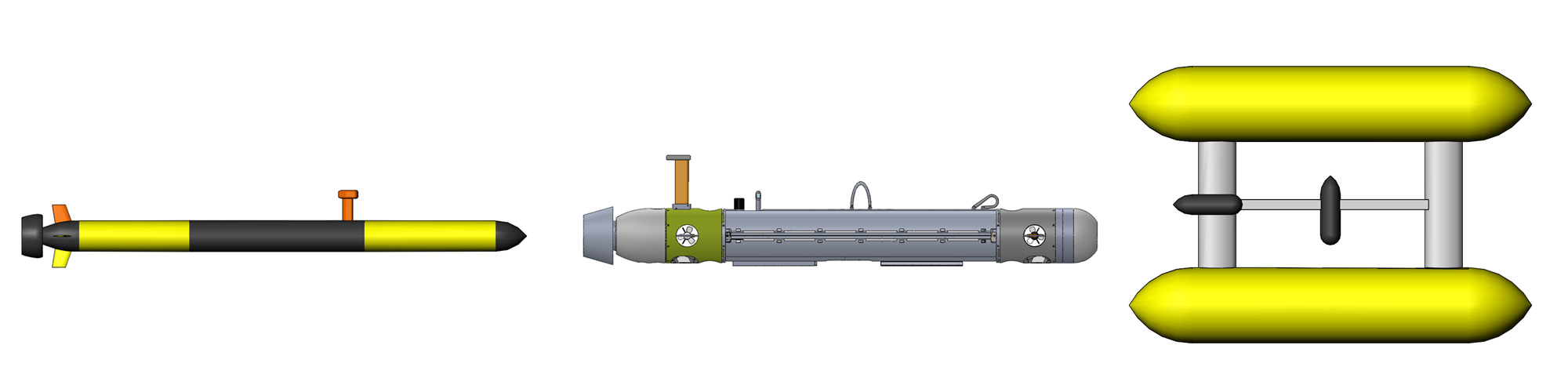
The Babysitter
A big part of the University of Sydney’s team has been developing navigation systems for these various platforms. Today, those capabilities are fairly mature, so the experts are focusing now on the ability for vehicles to communicate with each other underwater and improve their navigation estimates by exchanging information. One exciting addition is the surface vessel.
The surface vessel is a catamaran with an acoustic array that can compute the distance and position of all the underwater vehicles beneath it. It will be designed to track and communicate with the underwater vehicles while they are underway. “We’d like to demonstrate how to keep track of the vehicles and replan their missions if necessary, but from a vessel that is autonomous,” explains Dr. Oscar Pizarro, Chief Scientist, “which opens the possibility of freeing a ship like Falkor to do other tasks while these vehicles are working. This way, monitoring the progress of the mission doesn’t tie an expensive ship full of humans to just babysit these robots.”

Prof. Stefan explains how the integration between each underwater vehicle and the surface vessel would run: “We program the underwater vehicle after looking at bathymetric charts to decide which areas we want to survey. We then program a mission, and get the vehicle to go down – “mowing the lawn” by navigating back and forth. It might spend a little more time on one feature and then move to another, with the surface vessel would following along, keeping track of its progress and status.”
There are surface vessels capable of very long-range deployment and that can take advantage of the sun or wave energy to make them very energy-efficient. In Prof. Williams’ opinion, combining those capabilities with the possibility of deploying and recovering underwater vehicles could change the way researchers perform ocean science.
Huge amounts of time and effort have been invested in developing these robots, and the road ahead is still very long. Dr. Oscar Pizarro, however, has no doubt that the work is worth it: “There are several reasons. From the point of view of our society, understanding how the oceans work and what is happening to them is critical. We take them for granted, but oceans really support life on Earth in many ways. To understand how to manage them and arrive responsible, cost-effective decisions, that will ultimately keep us alive depends on understanding the oceans.”

