On R/V Falkor, several Autonomous Underwater Vehicles (AUVs) are being optimized individually. Meanwhile, the team is experimenting with artificial intelligence that will enable the machines to assess risk, complete missions, and replan actions in conjunction. At the same time, software is being developed to act as an umbrella that keeps track of operations by displaying maps of the seafloor, tracking the vehicles underwater and monitoring other vessels navigating in the vicinity. Simplicity does not seem to be the order of the day, yet the resident engineers are constantly looking for elegant and straightforward solutions to attain their ambitious objectives.

Keep it Lagrangian
As far as AUVs go, it does not get much simpler than a Lagrangian float. Lagrangian is a term coined after the French mathematician Joseph-Louis Lagrange. “There are two ways of describing fluid flow, or the way water and fluids move,” explains Dr. Chris Roman of the University of Rhode Island (URI). “One is Eulerian, which means you sit there and you watch the water go by. Lagrangian means you drift with it to see where it is going.”
Dr. Roman’s Lagrangian float can only control its altitude – or its distance from the seafloor – as it simply drifts along with the currents. “Once you throw it in the water, it can go down to a depth, but then it has no ability to drive around: it can only go up and down,” says Dr. Roman, whose team is in charge of optimizing the float during this expedition. “The float is really on the end of the spectrum with regards to simplicity; it is probably the cheapest vehicle you are going to get to collect images of the sea floor.”
The float is depth rated to one hundred meters, which means it can only do relatively shallow dives. Such constraints might make it seem like a limited tool, however what the URI float aims to do, it does very well.
Snap
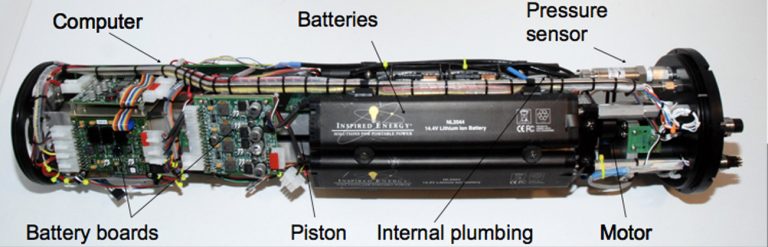
There are thousands of Lagrangian floats drifting in the deep ocean today, collecting data about ocean circulation, most notably for the Argos program. The URI float is different in that it has been designed to carry bigger, more energy intensive instruments. It has a sonar altimeter that pings the bottom of the ocean to detect how high above the seafloor it is, an internal piston to change its ballast, and a small thruster to help it adjust depth. The development of the Lagrangian camera float was funded by the Rhode Island Research Alliance and the NOAA National Marine Fisheries Service – Advanced Sampling Technology Work Group (ASTWG).
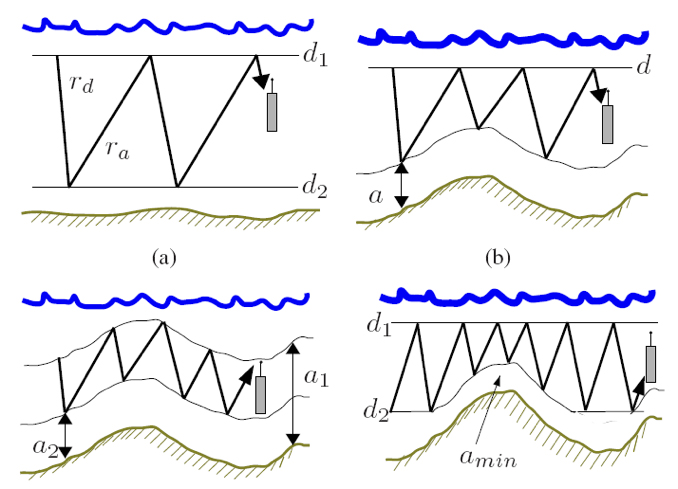
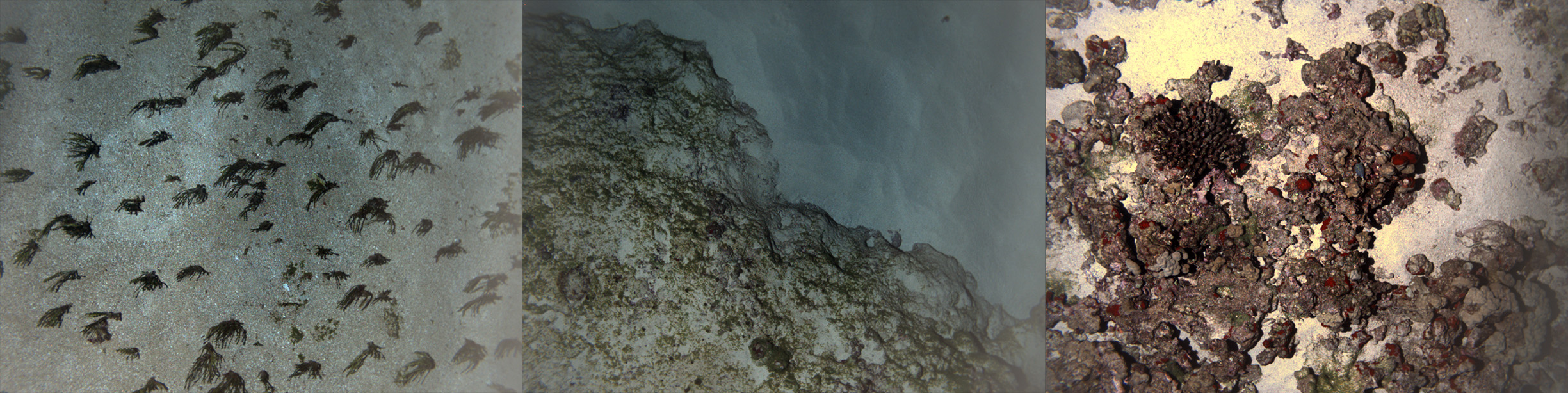
On the float, two cameras and a flash strobe are pointed down to provide stereo images of the seafloor. “You can program it to stay, say, three meters above the seafloor and take pictures and then throw it in the ocean. It will go down on its own and constantly measure the height above the bottom and automatically make adjustments as it is drifting,” describes Dr. Roman.
Distance from the bottom and lighting are the most important factors in imaging. These factors ensure that objects are in focus while being photographed. “The main point of the instrument is that it is the simplest way to get good images. Other AUVs get good images but they are also more complex. With the float, the idea is that in order to get good pictures, all you need to do is control the altitude and have a nice camera. After that, it doesn’t really matter where you are going, so let the current take you and just keep the vehicle as simple as possible.”
Practicality
The Lagrangian float can take nice images but can not steer itself to specific locations or points, which is why it is intended to be used in combination with other more complex AUVs. For instance, in one scenario the float can be used to explore new areas. When its cameras detect an interesting feature or habitat, a more capable AUV would be deployed to take a closer look in a systematic fashion.

“Let’s say in the first year of a habitat assessment you go out with AUV Sirius and you make a series of regular grid surveys,” explains Dr. Roman, “then you’d want to go back the next year or the year after that and see if things have changed. Do you want to get Sirius back every year after that? Probably not: it is expensive and requires more ship support. You could go out with the float in the off years and just check, quickly, with an easier instrument to see if things have changed.” The float would not be able to cover the exact same grid as the previous AUV would have navigated, but engineers are developing algorithms to automatically detect areas where images overlap and so that comparisons can be made.
During the Coordinated Robotics expedition, the URI team is developing the methodology to use the Lagrangian float together with other instruments. They are looking for more effective and efficient ways to innovate the way the oceans are explored. Keeping it simple is leading the way.

