After a successful port call in Honolulu prepping remotely operated vehicle (ROV) SuBastian, we have safely completed our first dive to the seafloor! After piloting the ROV for nearly six hours, the team was able to return R/V Falkor with a dozen seafloor samples as well as numerous live coral samples.

Getting to the Bottom
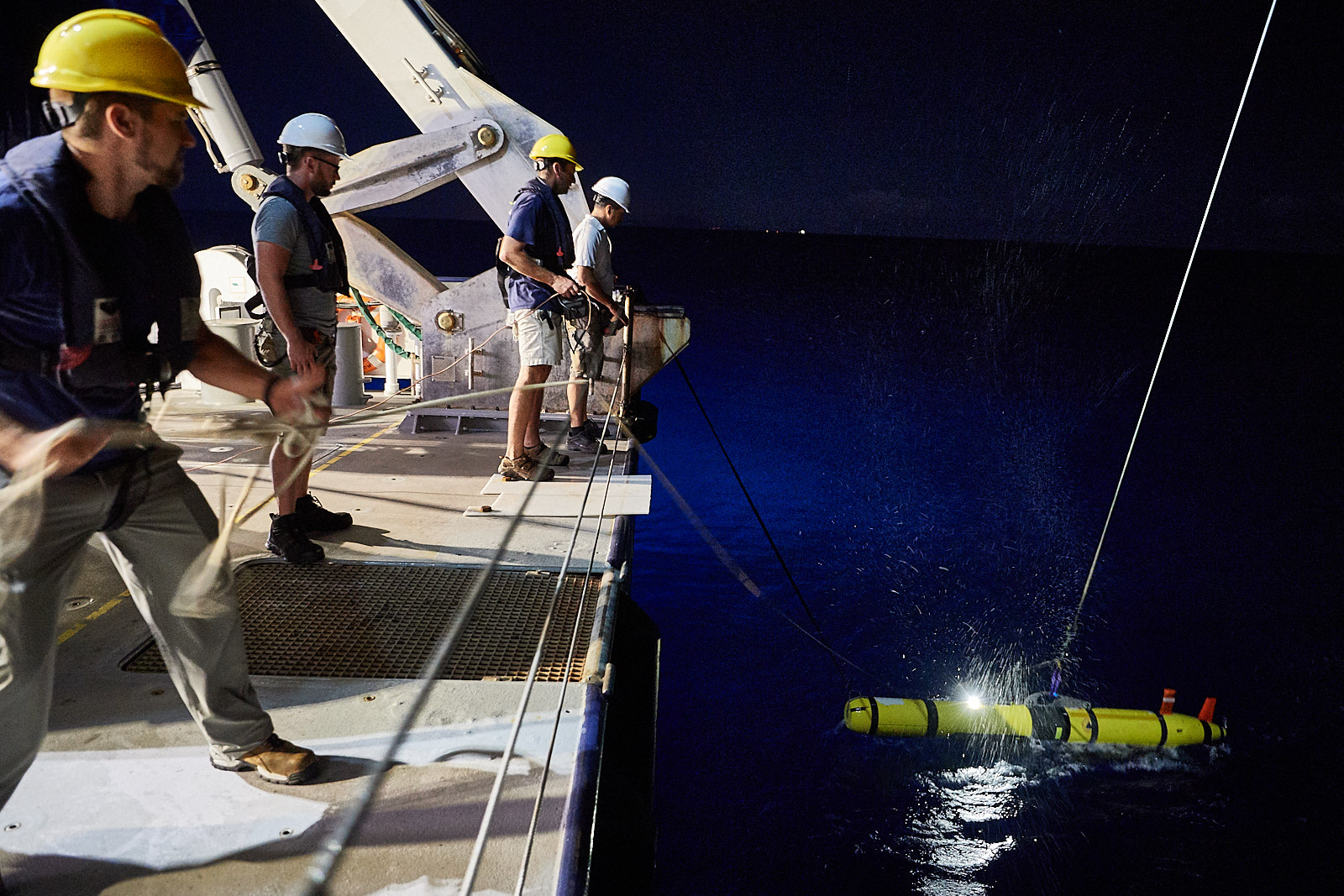
Deploying SuBastian involves many hands. The ROV team works together with the ship’s crew to safely hoist and lower SuBastian into the ocean – combining a team on deck manning the winch, taglines, A-frame crane, the bridge maintaining position, as well as the ROV team in the science control room. Inside the control room the team has access to a large suite of diagnostic tools to help monitor SuBastian. Here, pilots and techs perform a checklist of actions, such as monitor temperatures of hydraulic drive motors, verify all cameras and lights are functioning, and other tasks to verify the ROV is prepared and ready to begin its descent to the seafloor.
While on station, Falkor is subject to winds and ocean conditions, which can cause challenges when trying to maintain exact positioning. It is relatively easy to maintain position within a few hundred meters with no equipment over the side of the ship, however when SuBastian is in the water it is imperative that the ship maintain position within a few meters. This minimizes stress and danger to the umbilical cable that connects ship and robot. This need for precision also elevates risk and difficulty factors.
To assist in maintaining position, the Falkor uses the onboard dynamic positioning (DP). Commanding Officer Jason Garwood explains: “DP is a computer system that utilizes the bow thrusters, controllable pitch propellers, and rudders to maintain position in the given weather conditions.” Without DP the crew would be challenged to manage not only position but also other responsibilities, such as watching for other vessel traffic, managing alarms, and ongoing bridge duties.
Capturing the Science
The breadth of technology utilized in the research taking place this expedition is substantial. SuBastian continues to go through upgrades, including instrument modifications to suit scientists needs. During this expedition we are capitalizing on SuBastian’s modularity – during some dives we are capturing coral samples, while on other dives we are using a photo-mosaicing package to create large scale, high-resolution imagery of entire reefs.

To collect coral samples the team has two hydraulic three-dimensional arms that can move in many ways our own limbs cannot. The manipulators at the end of each arm can be gentle as well as rock crushing, operating up to 4000Nm of grip force. “You certainly do not want to shake hands with them,” jokingly warned ROV technician Adam Wetmore. Yet these handles are what enable the crew to get the exact samples the science team are looking for.
As Kate Herries describes, “We are super excited with the sampling. Getting our processes in place and preparing for the rest of the cruise.” Being able to obtain the exact samples the scientists see through the cameras is crucial to the goal of the research.
High resolution imagery is obtained using two pre-calibrated stereographic cameras looking downward from the ROV. Pre-determined courses will be “flown” with little human interaction in order to keep the ROV on track as well as maintain a 2m height above the seafloor – the optimal height for the stereographic cameras. Electrical engineer Nic Bingham points out that these cameras can “determine if one coral head is 7 cm in height while the coral head next to it is 14 cm. Through a collaboration with the University of Sydney, the team uses a Simultaneous Localization and Mapping (SLAM) program to combine the images into a three-dimensional mosaic. This will provide the scientists with highly detailed 3D maps of the reef in conjunction with coral samples.
Another exciting development on this cruise is the use of Squidle+. This software is a tool that enables the science team to annotate in real-time the formations, types of coral, geological makeup of the seafloor and unique elements that are seen in-situ. The software combines all the annotations from a dive (and ultimately the cruise) compiling them into a single repository for the scientists to utilize later during analysis of all the data. Adding more power to the software is the ability for annotations to be made at anytime, by anyone in the science party.
Ultimately, there will be several types of data collected by different platforms: maps and data points, backscatter imagery, multibeam information, coral sampling, and stereographic imaging. These will come from both legs of the expedition, using autonomous underwater vehicle REMUS, ROV SuBastian and the ship itself. Altogether, this builds the structure and provides the data necessary to analyze how these corals were affected by changing sea level during the last ice age – and provide techniques to better assess future sea level changes.
