
Log Post: Lagrangian Float and Scott Reef
Check out this footage for a closer look at some of the scenery the scientists on Falkor are mapping while simultaneously running scenarios to get several AUV’s to work closely together.
Search Results for
Check out this footage for a closer look at some of the scenery the scientists on Falkor are mapping while simultaneously running scenarios to get several AUV’s to work closely together.

For Autonomous Underwater Vehicles (AUV), issues of navigation and communications are often the most difficult problems to address as there are few options for transmitting messages underwater. This is because underwater communication uses acoustic waves instead of electromagnetic waves, which are less efficient. Above ground, high frequency radio waves transmit data at near-light speeds, but … Continued

Quite accidentally, by trying to meet deadlines of U.S. East Coast media, I came to experience the nocturnal cycle of ship life. Though night watch is a quiet time (if things are going well, anyway), it is not an inactive spell. Operations onboard research vessel Falkor occur twenty-four hours a day. If the ship were … Continued

In nautical terms, a “flagship” is the lead ship in a fleet of vessels. Usually it is the largest, fastest, most heavily armed, or best known of the group. The HMS Sirius was the flagship in a fleet that set out in 1787 from England to establish the first European colony in New South Wales, … Continued

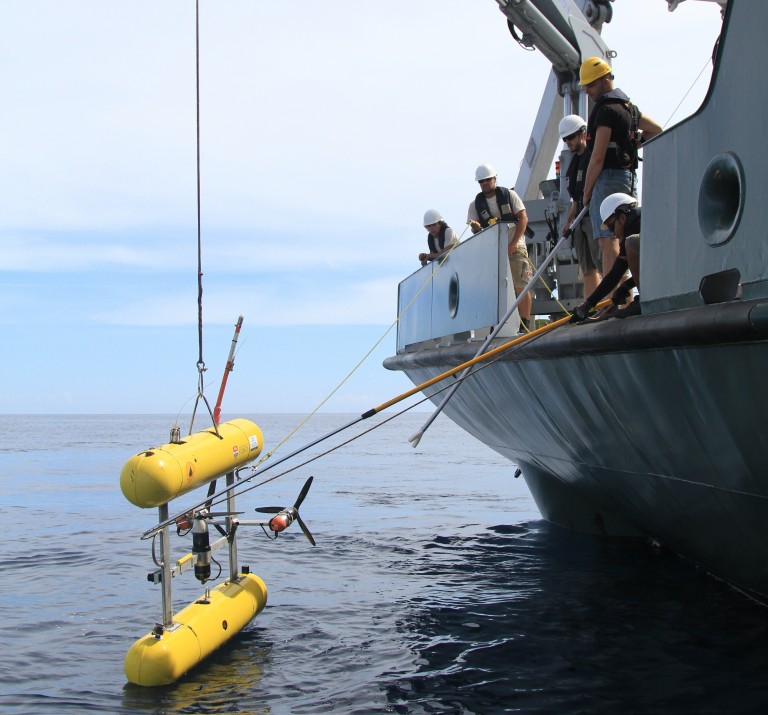
One of the autonomous underwater vehicles being used on the Coordinated Robotics cruise is a Lagrangian Float. Named after the famous French mathematician Lagrange, Lagrangian Floats do not move on their own, but instead float in the water. Scientists can program the 60 lbs. float to submerge, drift, or stay exactly two meters off of … Continued

Jeffery Oshiro is a Masters Student at the University of Hawaii at Manoa in the field robotics laboratory under supervision of professor Brian Bingham. He is operating an aquatic vehicle called the Wave Glider. In an interview on Falkor, he described the vehicle and how it will be used during the Coordinated Robotics fieldwork. The … Continued
Learn how scientists onboard R/V Falkor callibrate their underwater robotics for deployment in the Timor Sea at Scott Reef. Chief Scientist Oscar Pizarro from the University of Sydney discusses the preparation currently being completed on the underwater robotics such as gliders and AUVs, while Richard Camilli from Woods Hole Oceanographic Institution explains the importance of callibration … Continued

We have arrived at Scott Reef! The scientists and crew have begun to work on the details for operating robotics from the ship. Logistics are a priority, especially when implementing plans and practices for the launch and recovery of important robotics. Everyone on board is busy trouble-shooting different mechanical and software systems before beginning open … Continued
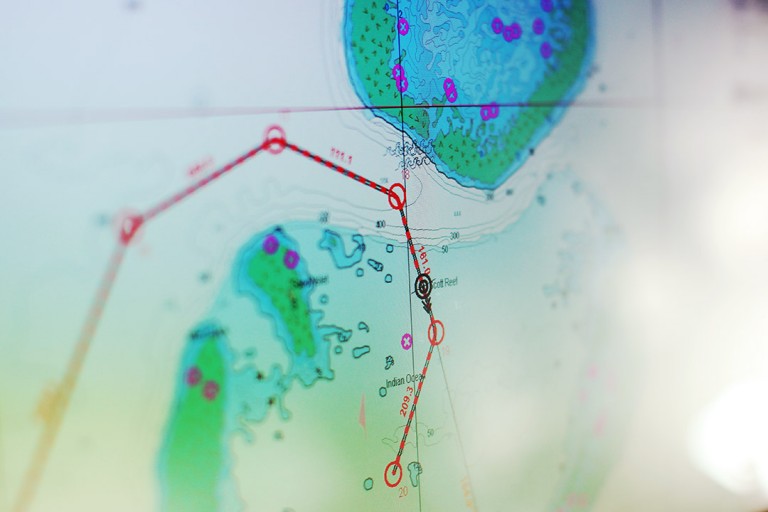
Falkor’s destination on this research cruise is a remote location known as Scott Reef, nearly 300 km north of the Western Australia coast. Sitting on the edge of the continental shelf, these atolls or reef structures encircle lagoons resembling misshaped rings rising into a blue sky. Rings of depth These rings of reef rise from … Continued

Even docked, the water rushing under Falkor looks like a powerful river. One Broome local described it as the rhythmic cycle of the ocean breathing, but it seems like seriously heavy breathing to me. The tides here are unlike any I have ever seen; growing and falling over 10 meters as we prepare for the cruise. … Continued