Once the LRAUVs Opah and Aku rendezvoused with the Falkor in the center of the eddy, it was time to switch them from survey mode to tracking and sampling mode. Our target eddy feature, the Deep Chlorophyll Max (DCM, discussed here), is indicated as a bright red/orange color in the data visualizations of Opah’s sensor output, indicating the increased chlorophyll signal that hovers ~100 meters below the surface ocean. In the clear oceans around Hawai‘i, it is easy to see the DCM when contrasted to the low (blue) chlorophyll signal above and below it.
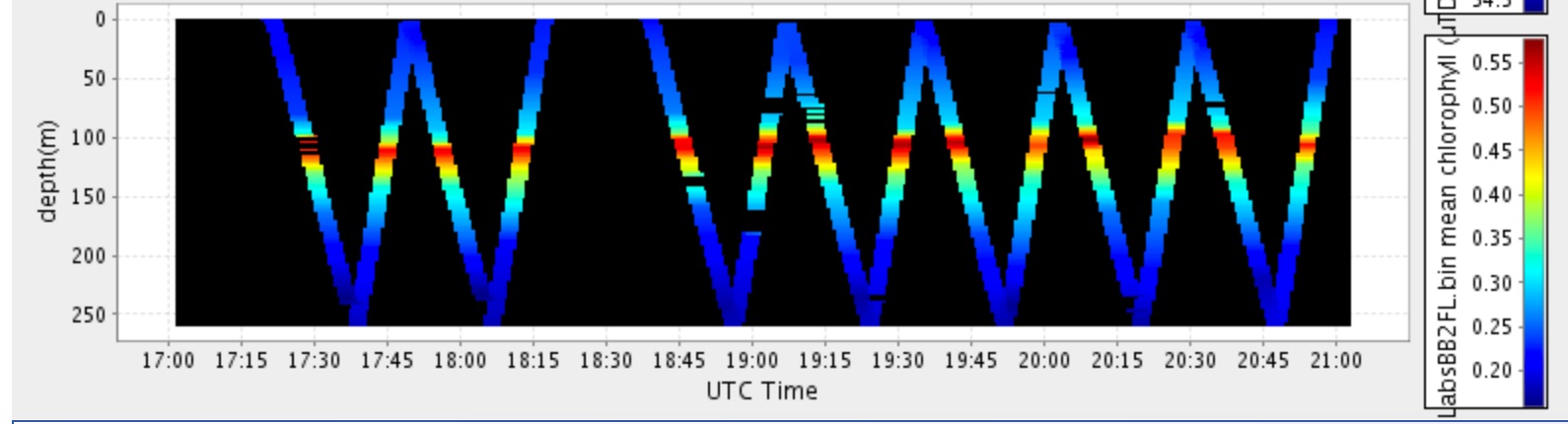
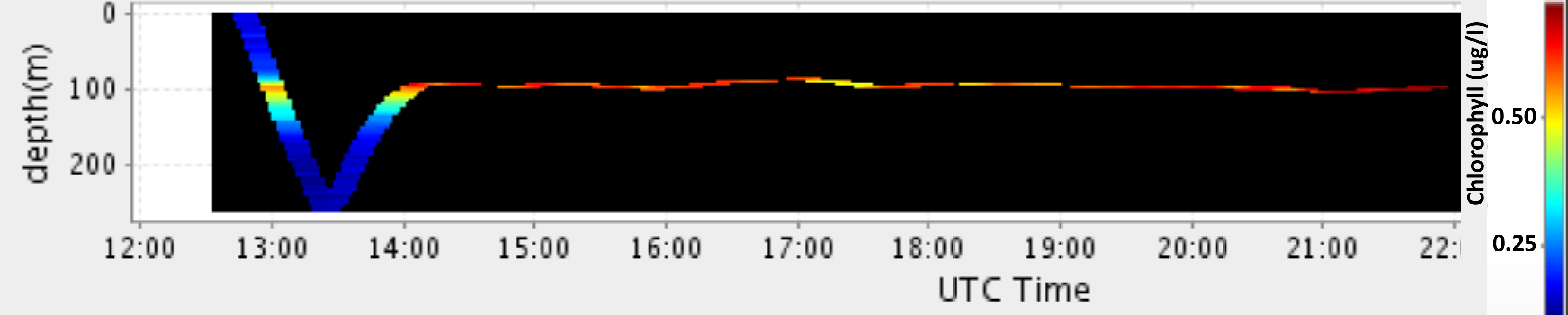
The difference between an LRAUV in survey mode (Opah, above) and tracking mode (Aku, below) is strikingly clear. Once Aku was given a new mission – to find and lock onto the region where the DCM is located, you can see how precisely these vehicles can track and sample features in the water. Aku did a single profile down to 250 meters, returned to the exact spot where the DCM was recorded on the way down, and locked onto that signal for 8+ hours. The LRAUVs’ ability to continually track a feature of interest, in this case the DCM, has the potential to greatly improve how microbial oceanographers track and study microbes – and therefore important processes microbes mediate – in the ocean.
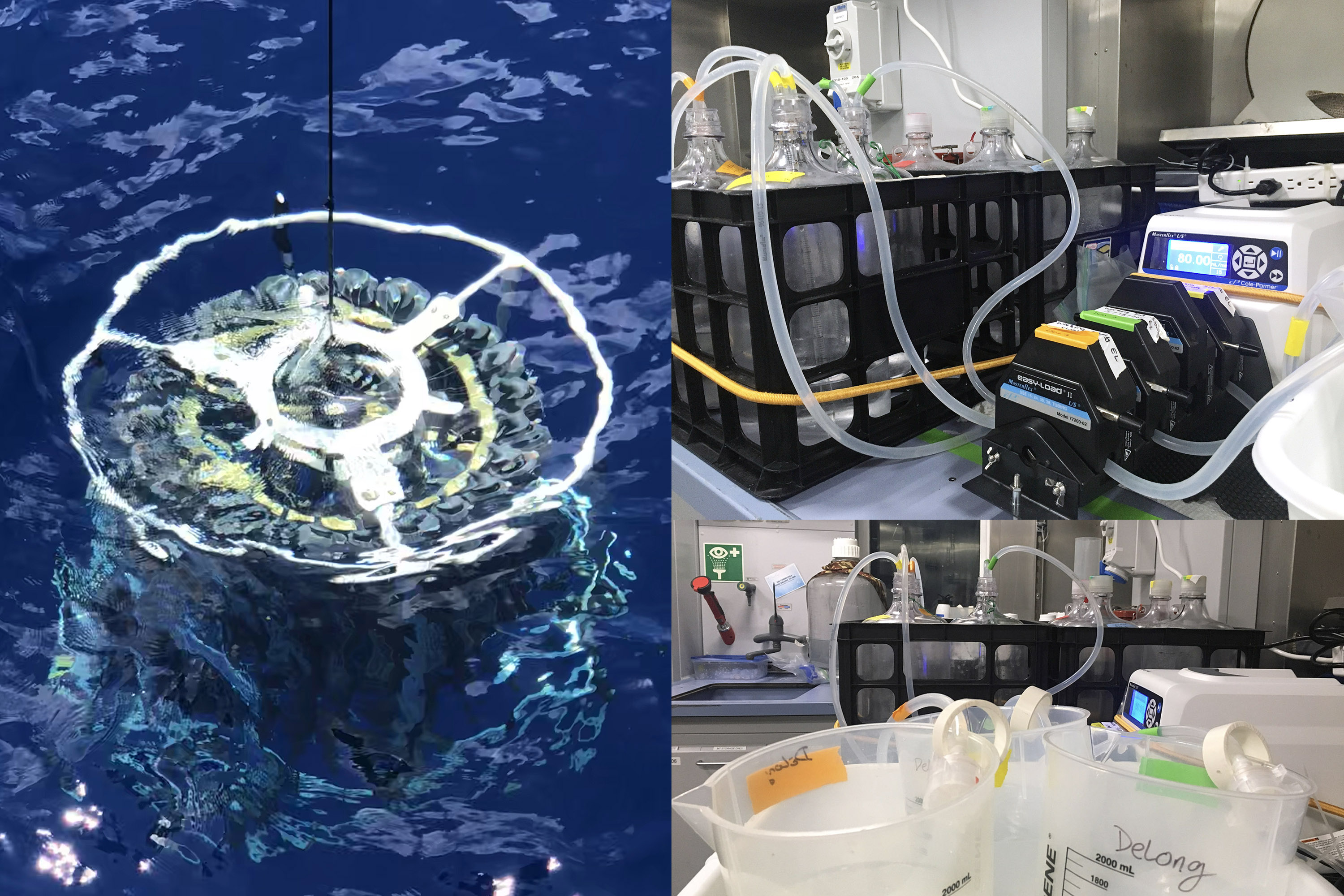
Microbes occur everywhere in the ocean, but oceanographers usually lower bottles attached to a line in the sea to collect water (often a CTD cast), then bring it back to the ship for processing. Processing microbes at sea is often done by collecting microbes onto filters with very small pores (like mini fishnets), then preserving the microbial biomass for further analyses onshore. These days, that often entails genomic analysis of the entire microbial community. The challenge with collecting water and bringing it to the surface is that the ocean is constantly moving. Even though the Falkor has dynamic positioning, which keeps us steady on the surface, and we are in calm currents at center of an eddy, the water moves beneath us like a flowing river. A CTD cast can only collect a snapshot of that water. As the CTD descends, temperature, depth, and chlorophyll are recorded. These features are used to mark where to collect water on its way back up.
 Comparison of Aku tracking and sampling the DCM vs a traditional CTD cast.
Comparison of Aku tracking and sampling the DCM vs a traditional CTD cast.
Aku, on the other hand, is a LRAUV with an Environmental Sample Processor (ESP) integrated into the body of the vehicle. It can track an eddy feature like the DCM and sample it simultaneously, over and over. It is sort of like taking snapshots with a camera over time. And by continuously taking these “snapshots” over time, the LRAUV-ESP vehicle can record a sort of motion picture of the microbes and their activities in the DCM, over extended periods, with an accuracy never before possible. We can finally study microbes on their own turf!
Next time, we will crack open the ESP and discover what is really going on inside.
