One of the primary focuses on this research cruise is to systematically photograph an area of approximately 25 football fields with a resolution that would allow us to see individual blades of grass. To achieve this efficiently, we have designed a special camera system. During the first days of transit, the ROPOS crew set up the ROV while the photogrammetry team prepared equipment in Falkor’s labs.
Due to the enormous amounts of data, we are connecting computers via 10GBit Ethernet to a 60TB storage server on the ship. At the same time data will be recorded to local hard drives, that can be easily taken home after the cruise. All this equipment – the screens, computers and other technology – has to be firmly secured so that items do not fall when the ship moves on the ocean. And indeed, although we have good weather, the ship rolls when we are on station (i.e. most of the time). In the short periods of time when we were able to sleep, one has to make sure to not fall out of the bed.

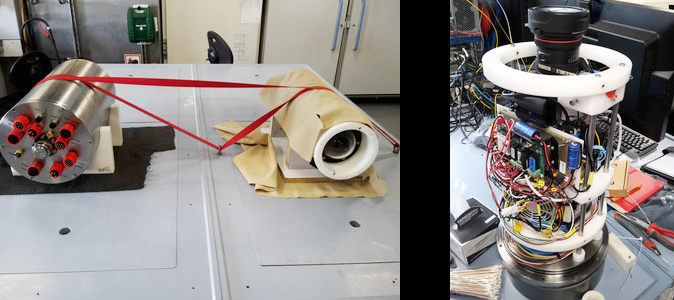
Finally, we have closed the pressure housings of the cameras, taking care that humidity inside is minimized, such that the lenses and dome ports do not get fogged at 3 degree centigrade in the deep sea. This is not an easy task when it is 30 degrees centigrade and humidity is between 80% and 90%. After a “dry run” on the ship with the complete system, we are ready for integration onto ROV ROPOS, which could be done after three days of preparation.
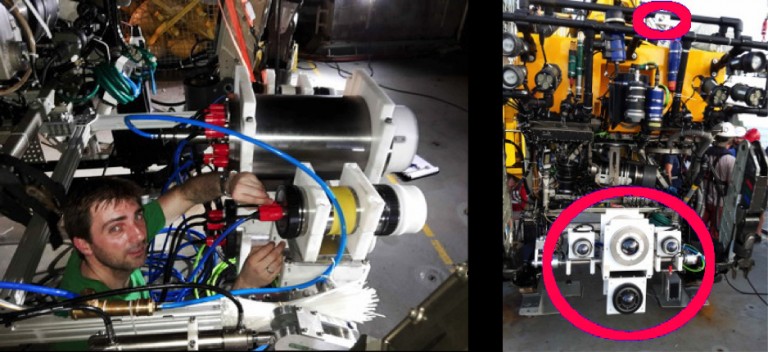
The photos above show the setup of our four cameras and a laser line on the top (there is another laser at the bottom, not shown here). The two small cameras to are the left and right eyes of the stereo system. The bottom camera is a high-resolution still photo camera. These cameras are synchronized with a flash (mounted on the swing arms of the robot) firing every 1.5 seconds, and will assist with photogrammetric reconstruction of the seafloor. On top, we have connected a multibeam echo sounder and a sensitive 4K video camera with a 180 degrees fisheye lens. This camera will serve for live broadcasting to YouTube, for teleconferences, and for virtual reality sessions. On top it can be used to track the footprint of the laser lines on the seafloor.
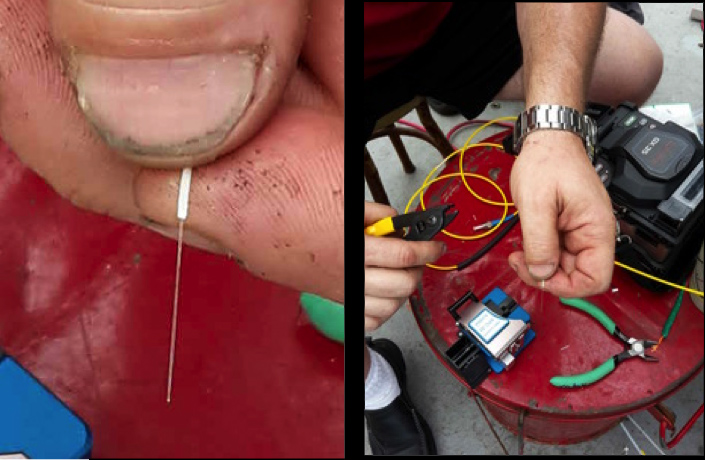
All the data is transferred live via a 4 km long fiber cable from the ROV to the ship. The pictures below show the extremely thin fiber before being spliced. One can easily imagine that connecting and handling fibers is a very delicate task, and one kink in the cable could damage the entire connection.
After everything was set up, we were happy to do the final test … and …. unfortunately the network connection was unstable, which did not allow reliable data transmission. After many trials we managed to modify the network setup, and use the great optical communications expertise of the ROPOS team. With only one day of delay, we were able to start our surveys. See the live broadcast of ROPOS dives (as well as archives of previous dives from this expedition) here.
