Species sampling is critical to ocean scientists in helping them obtain all kinds of information; there are many criteria such as diet, life span, reproduction and growth that can only be determined by a live animal. This knowledge can help assess risk of extinction and provide a baseline on the health of the ecosystem, especially in very remote and hard to get to regions of the ocean that are not accessed frequently.
Sampling in the ocean today is mostly performed the same way it was 30 years ago, and can sometimes be inefficient and destructive to fragile organisms. A significant amount of deep-sea species remain undescribed simply because they cannot be returned to the surface in good condition for taxonomic inspection…until now. Co – Principal Investigators Brennan Phillips (University of Rhode Island), Kakani Katija (MBARI), Robert Wood (Harvard University), David Gruber (City University of New York/Baruch College), and their teams of interdisciplinary researchers have been working on new technology that allows them to study species in situ, something that has never been done before. They anticipate that their work will set a new benchmark for future midwater expeditions and pave the way for a device that combines all of their technologies into a singular solution for specimen characterization.
Moving the Technology Forward
Most of the current biodiversity inventory scenarios describe new species and let us know “who” is there. But, they do not provide any physiological information on that species (e.g. metabolism, its aging mechanisms, its stress responses, etc.) In order to do this, new techniques need to be refined. For example, sustained observation with metabolic tracking, or a small portions of the animal (like a medical blood sample) could be taken and immediately preserved. Most submarines or ROVs take hours/days to reach the surface after the sample is collected, and in that time tissues begin to degrade from changing pressure, fluctuating temperatures, or exposure to light at the surface. For samples to yield useful information on physiology or genetics (especially RNA which is sensitive), they must be immediately preserved or “fixed” in the water at depth.
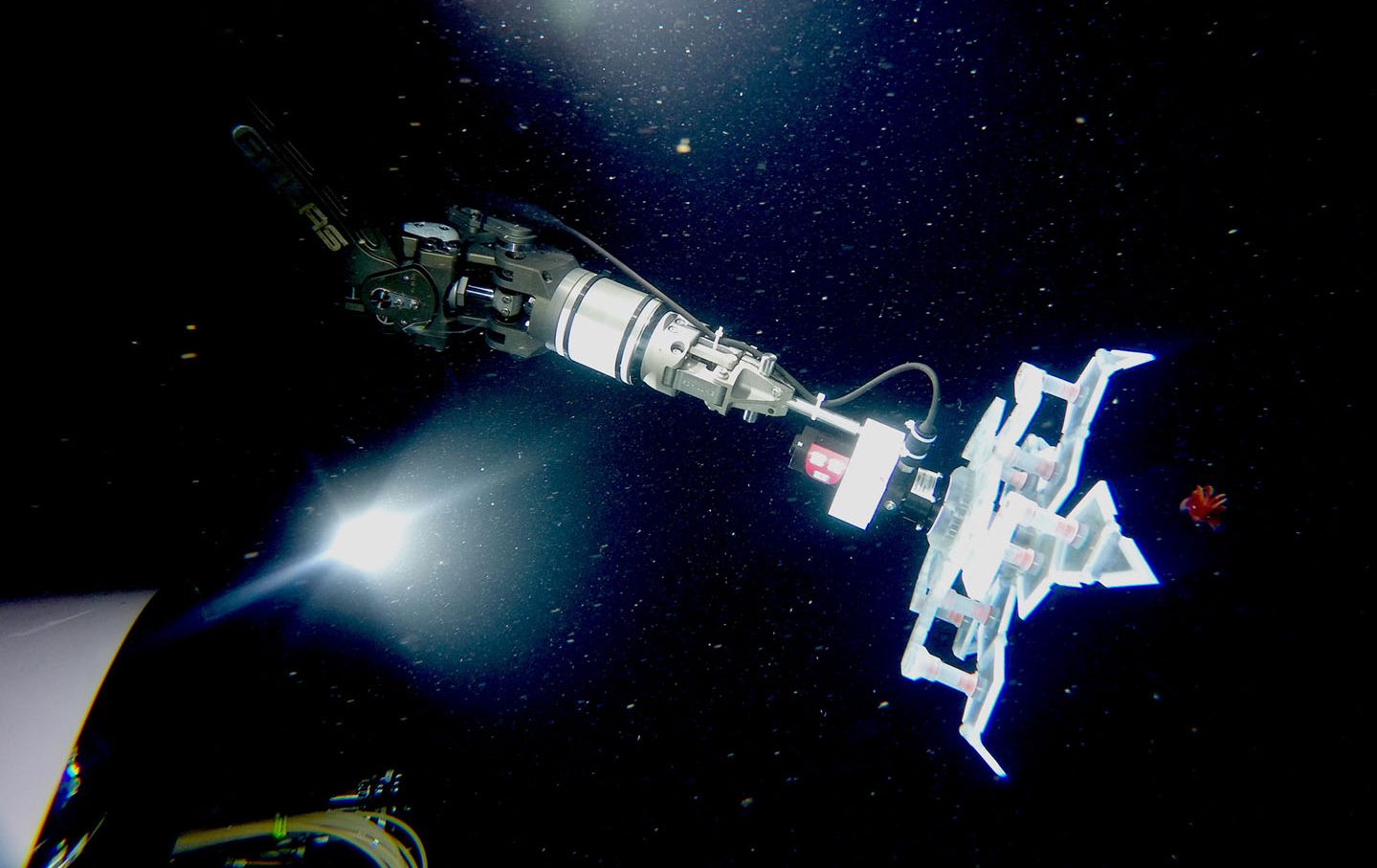
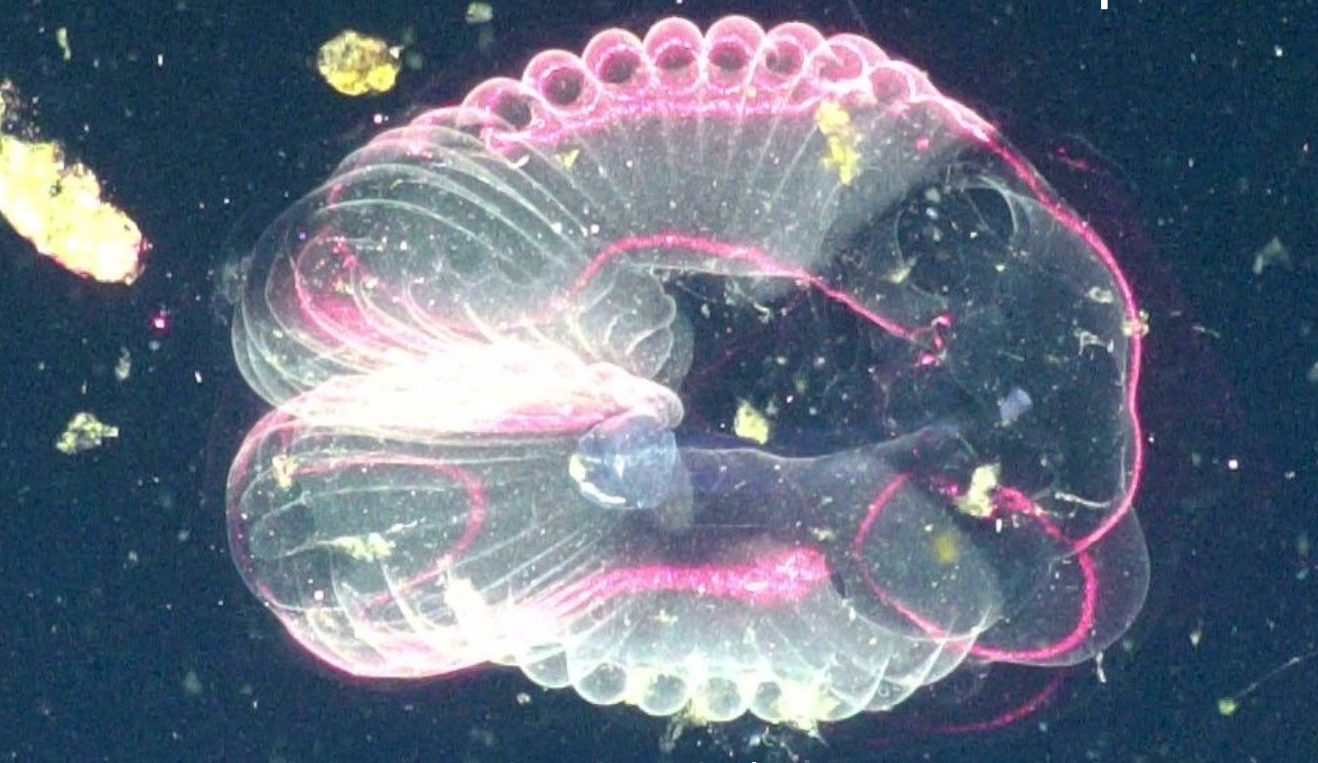
During their time on Falkor, the research team will outfit ROV SuBastian with a novel robotic encapsulation device and a near-real-time reality capture system to enable rapid characterization of deep sea organisms. The team also hopes to develop a technological workflow for species descriptions using three-dimensional imaging and genomic sequencing. A 2x next-generation RAD (Rotary Actuated Dodecahedron) Samplers (RAD2) will be integrated on one of ROV SuBastian’s manipulator arms. The sphere-like arm will be able to collect animals, taking a small sample for preservation. A DeepPIV (particle image velocimetry), developed by MBARI, will be integrated into SuBastian to visualize the liquid flowing through animals such as jellyfish. This instrument consists of a laser and optics that illuminate a sheet of fluid, allowing the fluid motion to be quantified via imaging from the ROV’s high-definition science camera.
Testing Advancements in Action
Dr. Phillips and his team are looking to create a paradigm shift in how researcher perform midwater exploration. The ‘twilight’, or mesopelagic zone, is receiving renewed interest from the oceanographic community. There are numerous undescribed species dwelling in the pelagic zone beneath the limits of technical SCUBA diving, and improved survey methods have highlighted the biomass that exists in the deep scattering layer and beyond.
This technology trial will give opportunities to the science and engineering team to refine their process and equipment for an upcoming Falkor expedition in 2020. Many of the systems that they are working with are quite involved and complicated, and gaining experience with the instruments in the midwater regions will be paramount to future expeditions’ successful implementation.





Data & Publications
3D models of Cubozoan and Solmissus Jellyfish are available on Sketchfab and YouTube!
CTD, Event logging, navigation and imagery collected by ROV SuBastian is archived at MGDS.
The resulting shipboard sensor data is archived at Rolling Deck to Repository.
ADCP data is processed and archived by UHDAS.
In the News
A Gentle Grip on Gelatinous Creatures
Wyss Institute • August 28th, 2019
A gentle grip on gelatinous creatures – Ultra-soft underwater grippers reach next level of perfection
The Harvard Gazette • August 28th, 2019
Soft Robot Gives Jellyfish A Hug
(Audio interview)
Science Friday • August 30th, 2019