Legend has it that If you gave Albert Einstein an hour to solve a problem, he would spend fifty-five minutes thinking about it, and then the last five actively working on solving it. He believed the formulation of a problem was essential to finding its solution. This is a strategy that the engineers on Falkor are certainly applying. When trying to explore the depths of the oceans – or the water worlds orbiting in outer space – problems abound.
The team does not aspire to simply solve single problems as they arise. They strive to identify patterns and develop automatized tools to solve recurrent complications.
Single Agent
We will never have all the pieces of the puzzle. At any given point in the coordinated robotics mission, several variables are interacting and the results will vary widely. Currents might change, instruments might stop communicating, vessels find unexpected obstacles they need to avoid. These are all uncertainties which the resident experts are trying to characterize, decipher, and solve through algorithms and code. The result will be that they are better equipped to handle all contingencies that come up.
Coordinating a fleet of vehicles with high uncertainty factors, as well as considering the working dynamics of the ship and the people onboard, requires a lot of communication between people. First, they must keep it simple. Yuening Zhang, second-year graduate student from the Computer Science and Artificial Intelligence lab at MIT, works with single-agent interactions. This means the exchange that takes place between two different actors. “I want to think about the kind of automation that can help reduce the user’s effort, while being careful about the planner totally taking over. Having the robots and humans interact with each other continuously rather than giving up on human’s control can provide better quality plan,” she explains. She looks for ways the automated planner can help users with their daily planning tasks. By proactively engaging in negotiation with the users, the planner is able to learn about their preferences, and hence make suggestions about the plan.
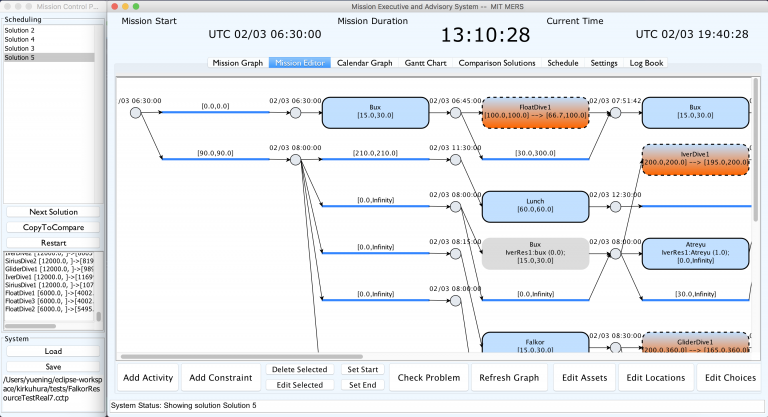
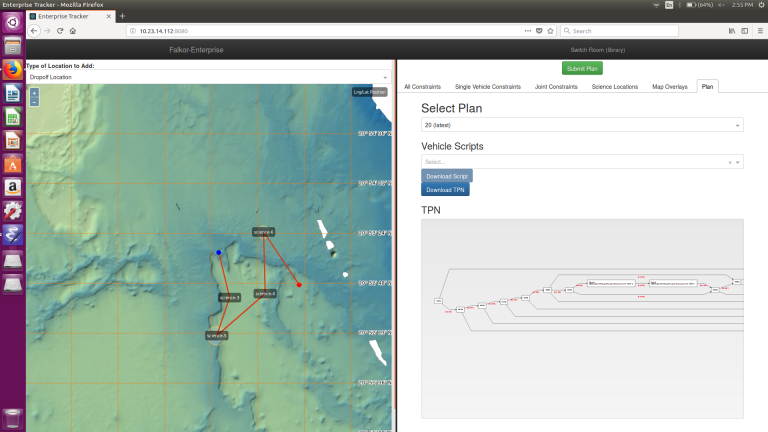
Yuening is part of Dr. Brian Williams’ team, which is working on a planning platform (fondly referred to as The Enterprise in reference to Star Trek). Her focus on single-agent negotiation would enable The Enterprise to involve humans in the decision-making loop while interacting with them in an effective and natural way, so that humans can steer the wheel of automation and get a plan to their likings. Automated scheduling tools that help operators to device feasible mission plans, thereby maximizing scientific time, has been the core of her work during the expedition.
Multi-Agent
Single-agent interactions are complex enough, but many times it is necessary to invite more actors to the scene, adding to the fire. Nikhil Bhargava, a second year PhD student in the EECS department at MIT, is facing the challenge head on. “My area of focus is multi-agent coordination under difficult or uncertain communication conditions,” he explains.
In a coordinated robotics scenario, most people think of multi-agent coordination as getting multiple robots together to achieve a complex task. Yet the real world is not so much about robots interacting with each other, but about people interacting with each other, and then people interacting with robots. “As soon as you throw people into the equation, there’s a lot of additional uncertainty and problems that occur,” says Nikhil. “Even if three people are working together on achieving some end goal, and they all have the same priorities, it still might be the case that they don’t end up completing their mission. And part of the reason for that is we don’t know what is going on in everyone’s head at the exact same time.”

Navigating Through Uncertainty
The team has their work cut out for them when they meet with Captain Phillip Guenther to learn about the ship’s operation and logistics. “We want to understand what they care about, their constraints, what would be more useful for them, from the science and the officers point of view,” explains Yuening, “and apply our technical expertise to provide better capabilities for them.”
For Nikhil and Yuening, it is all about identifying the needs of their users. “When we talked to Captain Guenther, it was very much like a fact-finding mission: How does the boat operate? Chain of command, how does that work? When you’re out doing science operations, what does that entail beginning to end? The hope is to get a little bit of insight on how he thinks, how the folks on the boat think about making decision in their capacities, and then figure out ways to automate it,” shared Nikhil. To him, one of the main challenges will be to devise solutions regarding the recovery of the AUVs and all of the uncertainties around revcovery operations.
The duo discovered that recovering the vehicles is not an exact science. The information sent by the vehicles can be wrong. Or they might be experiencing technical difficulties which would prevent them from sending any information at all. Or currents might be pushing the AUVs in unforeseen directions, just to name a few plausible complications. Another interesting dimension pertains the samples collected by the vehicles themselves: some might require different techniques for retrieval or a faster recovery, which would impact the planning altogether.
They are experimenting with a prototype software to evaluate the capabilities and user-friendliness of the planner and its user interface, but there is more to be done. They know they will return home with valuable information to finish the project. “Being on the Bridge and witnessing what crew cares about, and what actually happens in a mission like this gives us insights about what they really need, and the problems that come up in real life,” says Yuening. “So we can actually build tools to tackle real problems instead of imagining problems we don’t know are real or not.” Nikhil agrees, summarizing the experience in one simple sentence: “We don’t have answers, we have interesting problems.”

