While mapping the gaps in existing high-resolution bathymetry around the Phoenix Islands Protected Area is the primary scientific objective on this transit from Hawaii to Fiji, R/V Falkor remains abuzz with other scientific activity. In preparation for Falkor’s next cruise in Fiji, Carson Witte, a PhD student in Ocean and Climate Physics at Columbia University’s Lamont-Doherty Earth Observatory, has been installing a large variety of sensors around the ship which will facilitate the study of the sea surface microlayer, which is the boundary between the atmosphere and the ocean formed by the top 40-100 microns of the sea surface.
Data from these sensors, which include infrared cameras for measuring sea surface temperature, differential GPS for precisely calibrating the ship’s position, and three-dimensional wind sensors, will be used to understand the dynamics of the sea surface microlayer (SML) and the complex physical, chemical, and biological processes that take place within it.
One of the sensor platforms which will be deployed on the next cruise is a drifting buoy carrying four CTD sensors, which measure the conductivity, temperature, and depth of the surrounding seawater. Each CTD is arranged to collect data at a different point in the water column, with one logging data close to the surface, another about 1.5 meters below, and a third midway between the first two. A fourth CTD will be mounted on a linear actuator controlled by a stepper motor, which will move slowly up and down in the water column collecting CTD measurements with high spatial resolution. This buoy will be deployed from Falkor to drift freely with the ocean currents for eight to twelve hours, retrieved to download data and swap batteries, then re-dispatched to resume its floating mission in the currents around Fiji.

One of my tasks during this transit was assisting Carson with the stepper motor that controls the position of the fourth CTD sensor. A stepper motor is able to precisely control its angular position using a series of geared electromagnets, which when energized rotate a central gear into a specific position. By electrifying each electromagnet in sequence – a “step” – the motor can make a full rotation while keeping a precise position every step of the way. The stepper motor on the buoy is connected to a linear actuator called a lead screw, which converts this precise rotational motion into precise linear motion, thereby controlling the position of the CTD measurements with high spatial accuracy. In the wetlab aboard R/V Falkor, we wired up the stepper motor and motor controller to a power supply, and tested its functionality in the lab to ensure everything worked properly before installing it permanently on the buoy.

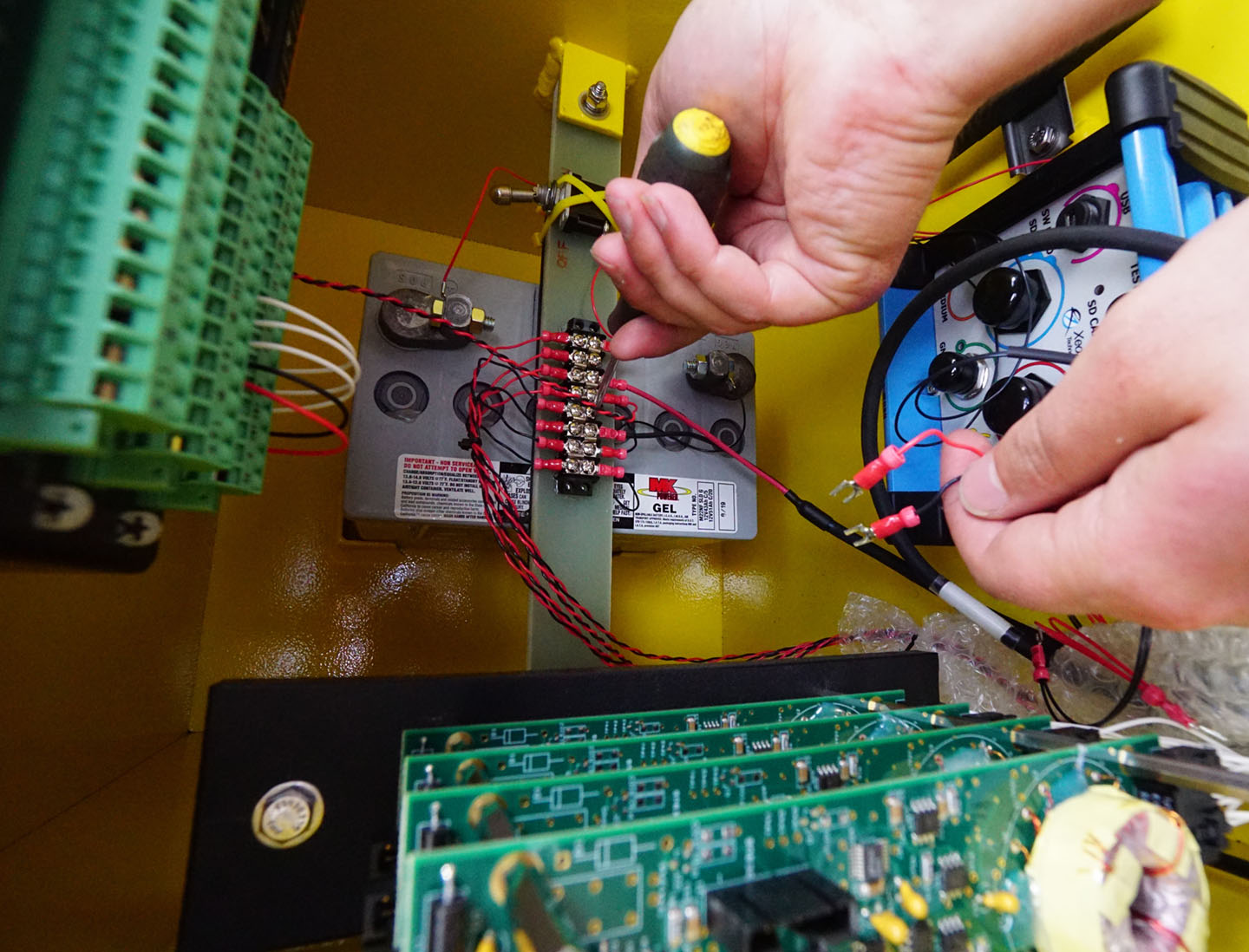
Other components inside this high-tech buoy include a wave logger, which tracks the height, period, and position of waves as the buoy drifts, and data loggers which log all the measurements coming in from each CTD and track the current position of the stepper motor. We wired up these components inside the buoy on the aft deck of Falkor, only occasionally having to stop to cover up the sensitive electronics when a tropical rainstorm rolled by.