Hello, my name is Blair and I am chief scientist on board the R/V Falkor for our expedition “Adaptive Robotics.” Today is day two, and all systems are go!
What we are trying to achieve on this expedition is to build multiresolution maps of the seafloor, where the resolution of the maps gets higher and higher the more interesting a particular region of the seafloor is. It may sound simple enough, but there are a number of challenges that need to be overcome first.

Against The Clock
A huge amount of information is needed for scientists and engineers to make the best use of precious opportunities we have while we are at sea. The biggest challenge is that even though our ability to collect data using underwater robots has advanced massively over the past few years, this advance has not been matched by our ability turn the data into quickly accessible information. In fact, it is very common for data collected in an expedition lasting just a few days to take several months to process and fully understand, and there are many times when we think in hindsight: “If only we had known at the time, we would have been able to do things better…”

Adapt to Evolve
In this Adaptive Robotics expedition, a team of 10 engineers from the UK, Japan, Australia, and Spain will investigate how computational algorithms can help us rapidly interpret, understand, and gain insights into the data our robots collect while we are at sea, so we are able to adapt and prioritize our missions accordingly.
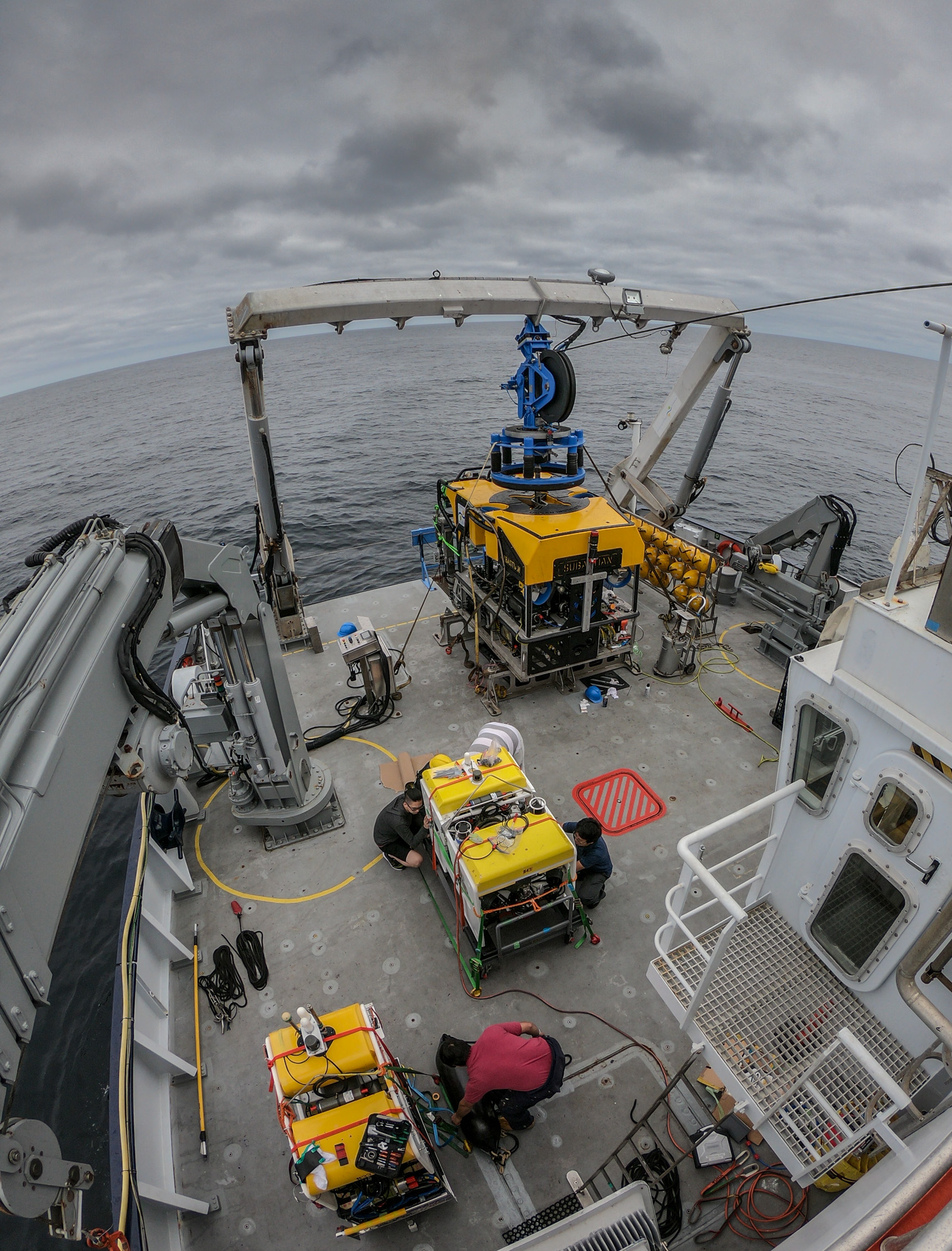
We will be deploying three Autonomous Underwater Vehicles: AE2000f, TUNA-SAND and TUNA-SAND 2 of the University of Tokyo, Japan, as well as Remotely Operated Vehicle SuBastian. All our robots are equipped with advanced 3D camera systems developed by the University of Southampton, University of Tokyo, and the University of Sydney to map the seafloor and its ecology, along with chemical sensors like the newly developed in-situ laser Raman probe that essentially brings an analytical chemistry lab to the seafloor.
A Dynamic Field
We will be deploying these robotic systems to study gas hydrate fields off the coast of Oregon and Vancouver. Gas hydrate fields present a huge number of challenges to study because they are such dynamic and interesting environments.
Our robots will map these environments from different altitudes, wherein the high-speed AE2000f will basically act as a scout, visually scanning wide areas of the seafloor and identifying points that are interesting from a biological or chemical perspective.
After analizing the data collected by AE2000f, we will deploy TUNA-SAND and TUNA-SAND 2, which will follow up together with ROV SuBastian to focus on getting detailed information in the regions that matter the most.
By the end of this expedition we aim have acquired exciting and focused data, as well as information products that would not have been possible to collect without rapid and intelligent data processing methods at sea. Hopefully this new technology will take not only us, but also the wider marine science community, further by helping us to understand the oceans faster.

