
ROV SuBastian
Developed by Schmidt Ocean Institute specifically to be operated off R/V Falkor, ROV SuBastian is outfitted with a suite of sensors and scientific equipment to support scientific data and sample collection, as well as interactive research, experimentation, and technology development. Full specifications and details can be found on its webpage.
SuBastian was first used during the Searching for Life in the Mariana Back-arc (2016) research cruise, and has been in operation ever since.

Launching SOI’s Sea Eye ROV from Falkor.Linda Tatreau
ROV SAAB SeaEye Falcon
Falkor’s own SAAB SeaEye Falcon ROV has been used to survey corals at Scott Reef in the Timor Sea. It has a 300 meter depth rating, a 14 kilogram maximum payload and a 450 meter, low-drag umbilical. AUV Sirius was used on the Timor Sea Reef Connections cruise (2015).
During the 2015 Timor Sea Reef Connections cruise, Falkor’s own SAAB SeaEye Falcon ROV was used to survey shallow and deep water corals at Scott Reef in the Timor Sea. Utilizing the camera, online viewers were able to follow along in real-time to see coral diversity as well as a few deep water corals spawning between 40-60 meters depth.

ROV ROPOS
ROV ROPOS is operated by the Canadian Scientific Submersible Facility (CSSF). It is designed to carry out a wide range of scientific explorations at depths of up to 5,000 meters. ROV ROPOS was used on the Open Ocean to Inner Sea (2013), Axial Seamount (2013), Virtual Vents and 3D Hydrothermalism (2016), and Ecosystem dynamics of Western Pacific hydrothermal vent communities (2016).
Length: 2.75 m., Width: 1.5 m. Weight: 2,729 kg

ROV Global Explorer
The Global Explorer ROV goes to depths of 3,000m beneath the surface, with multiple cameras, samplers, sensors, and a manipulator arm on the frame. It was used aboard Falkor during the Long-Term Effects of the Deepwater Horizon Oil Spill cruise (2012).
Length: 2.8 m., Width: 1.2 m. Height: 1.6 m.

ROV Comanche
ROV Comanche can dive to 2000 meters (1.24 miles). The ROV weighs 1100 kg (2425 lbs), and was built in Western Australia. ROV Comanche was outfitted to use during the in Perth Canyon cruise (2015).
Length: 50 in., Diameter: 5.8 in. Depth Rating: 1000 m

HROV Nereus
The late hybrid remotely operated vehicle (HROV) Nereus successfully sampled and filmed hadal environments before it was lost at 10,000m in the Kermadec trench. Built and operated by Woods Hole Oceanographic Institution (WHOI) {LINK: WHOI}, the unmanned vehicle operated in a free AUV or tethered ROV mode. Nereus was used on the Oases Hydrothermal Exploration of the Mid-Cayman Rise (2013).
Length: 50 in., Diameter: 5.8 in. Depth Rating: 1000 m

WaveGlider
The Wave Glider is an Autonomous Surface Vehicle, comprised of two major components. The first component, the “Float,” stays at the surface, while the “Sub” (submarine) hangs underneath by a 7-meter umbilical. The Wave Glider was used on the Coordinated Robotics cruise (2015).
Length: 1.2 m. Width 0.5 m.
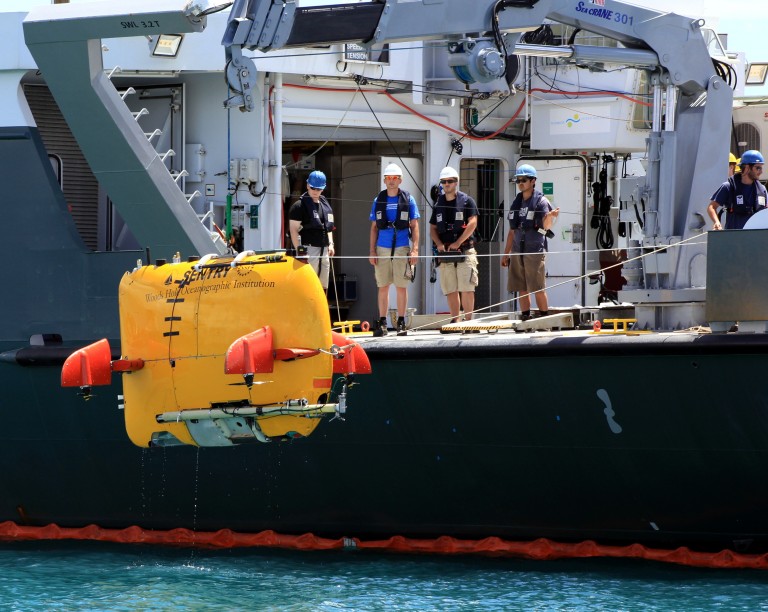
AUV Sentry
Sentry is an AUV in Wood Hole Oceanographic Institution’s (WHOI) fleet of vehicles. A large AUV with a depth capability of 6,000 meters, Sentry was used on The Iron Eaters of Loihi Seamount cruise (2014) and the Hydrothermal Hunt in the Marianas (2015).
Length: 2.9m (9.7ft), Width: 2.2m, Height: 1.8m, Weight: 1,250 kg

AUV Sirius
AUV Sirius is part of the Australian Centre for Field Robotics fleet. Sirius’s primary purpose is collecting stereo imaging to create 3D maps of geography and corals. Sirius also has a CTD, fluorometer, and multibeam sonar for high resolution mapping. AUV Sirius was used on Coordinated Robotics cruise (2015).

AUV Iver
Ocean Server Technology’s AUV Iver is generally used for coastal research and has a weight less than 85 lbs. it is designed to be a portable AUV. Used on the Coordinated Robotics cruise (2015).
Length: 50 in., Diameter: 5.8 in. Depth Rating: 1000 m

Slocum Glider
Woods Hole Oceanographic Institution’s (WHOI) Slocum Glider has a very high endurance and is able to be at sea for over 365 days. The Solcum Glider was used on Coordinated Robotics cruise (2015).
Length: 1.5m, Hull Diameter: 22 cm Depth Rating: 1000 m

Lagrangian Float
The Lagrangian Float moves with currents over coastal waters. An active ballasting system and acoustic altimeters enable positioning anywhere in the water column. The float is made up of a float body, internal circuitry, computers, external sensors, and cameras. Used on Coordinated Robotics cruise (2015).
Height: 1 m., Diameter: 30 cm.

UAV HQ-60B
During the Study Of The Sea-Surface Microlayer and Air-Sea Boundary (2016) expedition, the HQ-60B model completed its first science mission, taking instruments away from Falkor to undisturbed waters and bringing them back safely. This cruise was the first time Unmanned Aerial Vehicles carrying scientific instruments were launched from a ship without the help of a catapult or launching system. The aircrafts completed 15 flights amounting to more than 27 hours of flight.

Wurl Catamaran
Designed by Dr. Oliver Wurl and used for the Study Of The Sea-Surface Microlayer and Air-Sea Boundary (2016) expedition, this remote-controlled catamaran scanned the sea surface for over 130 hours and 450 kilometers during the cruise. Some 400 water samples were taken, to the point that every single bottle the scientific party brought onboard was filled. Measurements of the physical processes affecting air-sea exchange add up to around 75 terabytes of information.
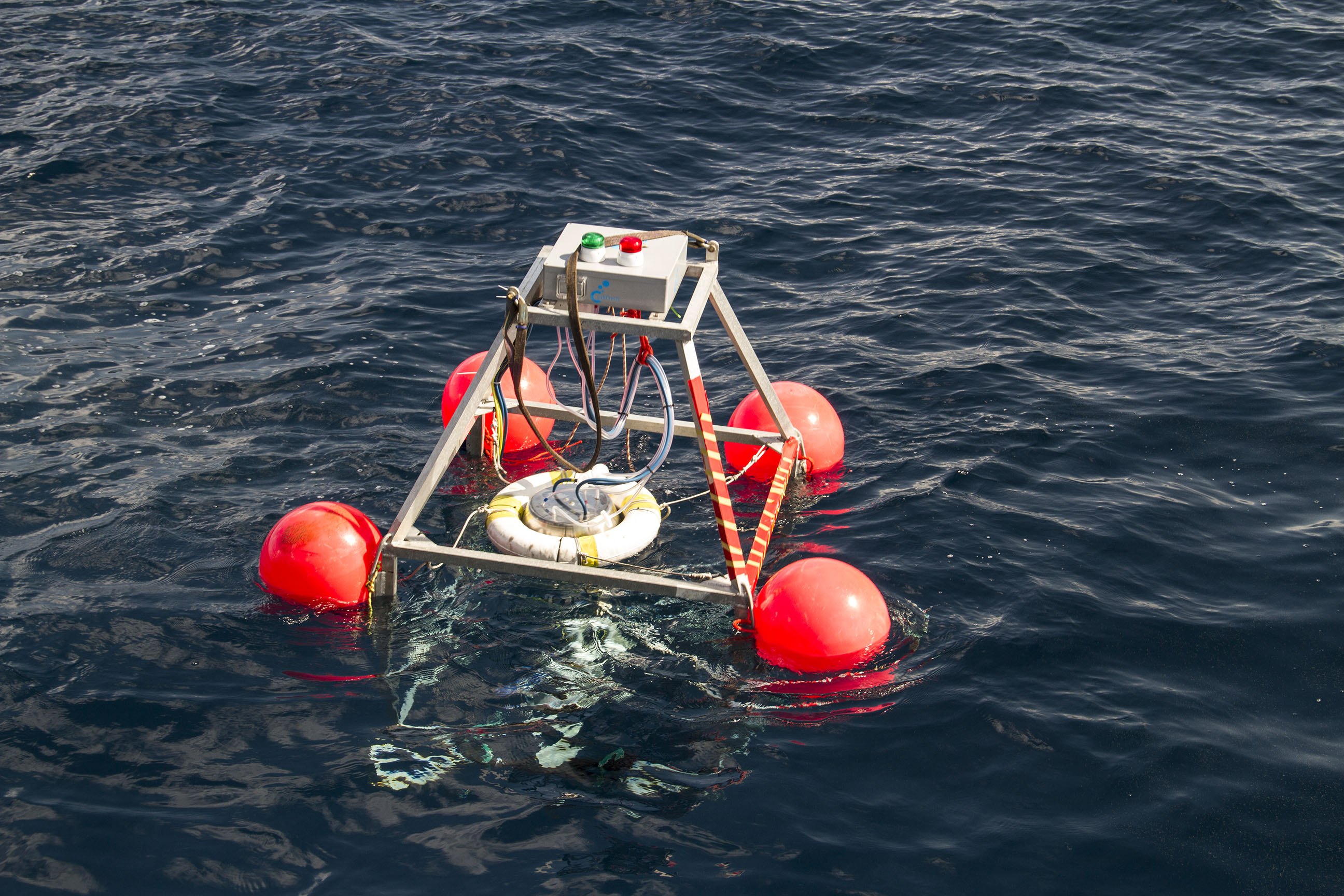
Snifel Drifting Buoy
Designed to measure the speed of the exchange of carbon dioxide between the atmosphere and the ocean, the drifting buoy is an expensive and sophisticated piece of equipment used by Dr. Oliver Wurl and team in the Study Of The Sea-Surface Microlayer and Air-Sea Boundary (2016) expedition. The drifting buoy gathered 100 gas transfer velocity measurements, and over 500,000 in situ data points were taken. Combined with the catamaran, these measurements of the physical processes affecting air-sea exchange added up to around 75 terabytes of information.
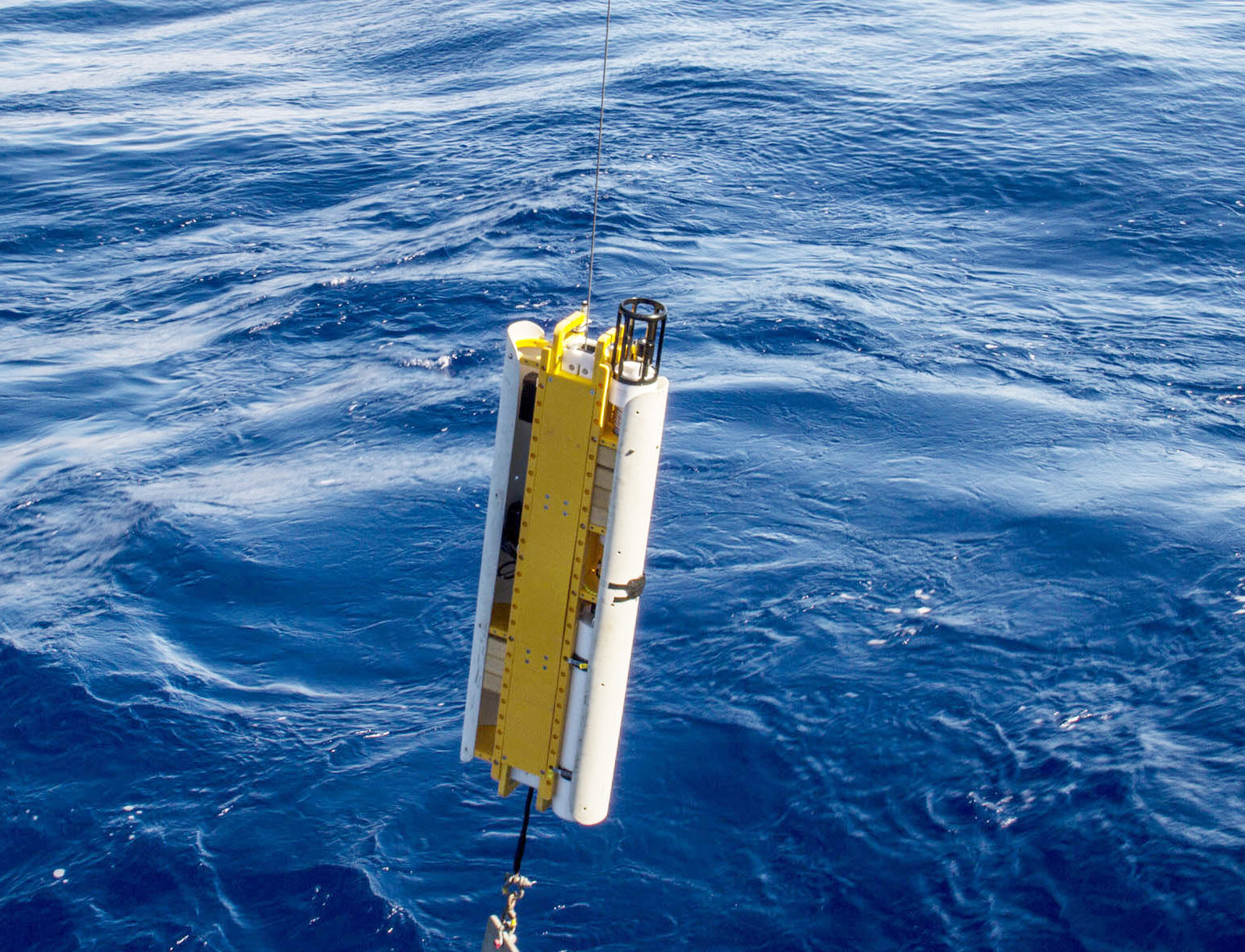
Wirewalker
The Wirewalker is a sophisticated instrument designed to take numerous measurements from the water column, while also capturing falling particles, as its sensors move up and down a 150 meter-long wire. It is assembled in distinct segments. At the top is a GPS-tracked buoy, and beneath this hangs a 3/16” stranded wire that stretches 150 m beneath the surface. As the buoy tugs the wire up and down over the waves, the sensor-laden Wirewalker uses a simple cam mechanism to rectify the wave action into a one-way motion down the wire. When it reaches the bottom, it hits a stop and releases it’s grip, gliding freely along the wire to the surface. This cycle is repeated every 10 minutes or so, giving a high resolution view into the physical and physiological variations of the plankton and particles in the upper ocean. It was used in the Sea to Space Particle Investigation (2017).