A very big part of this project depends on a piece of equipment called the ADCP (acoustic Doppler current profiler). This is one of the instruments that will help the scientists to find the location and breadth (the “beam”) of the Tasman Sea internal tide. To do that, they need to identify the difference in the speed of the water motion and direction inside and outside of this subsurface wave.
Water Music
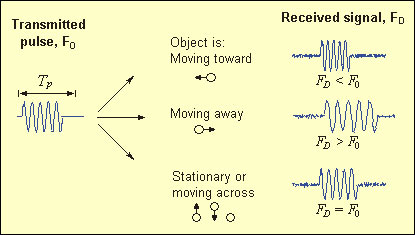
You’ve probably heard of the Doppler effect – that phenomenon in which sounds that are moving toward you have a different (higher) pitch than those moving away from you (lower pitch). Think of that quintessential sound of the racecar whizzing by you on the race track. Well, scientists take advantage of that natural effect to measure the direction and speed of moving objects – any kind of moving objects, even tiny particles in the ocean. This is where the ADCP comes in. The ADCPs we are using have four transducers that point out in an angled directions. The transducers send out bursts of sound waves (called “pings”) at a constant frequency (or pitch).

These sound waves are reflected off of any tiny particles in the water, like plankton, detritus, and even bubbles. Those reflected sound waves go off in all directions, and some of them bounce back in the direction of the ADCP. The sensors on the ADCP interpret sounds waves that return back to it with a lower frequency (than the original ping) as moving away from the instrument, those returning with a higher frequency are moving toward the instrument. The magnitude of the difference (called the Doppler shift) tells us the speed at which the particles in the water are moving. That gives us the velocity of the water current. The different transducers on the ADCP each covers a different quadrant of the water column and the instrument then uses all of these measurements, along with the onboard compass, to triangulate the actual direction of the moving water.
Perfect Pitch
Another cool thing the ADCP can do is measure the current speed and direction at different depths because the sound pings it sends out will continue to travel in the water until they are reflected back by a particle. ADCPs can have transducers that send out sound waves at different frequencies – lower frequencies travel farther, while higher frequencies don’t travel as far but are more precise (they can more accurately detect smaller Doppler shifts). The one the T-Beam science team is using is 300kH (kilo Hertz), which can measure current speed and direction for a distance of about 100 meters.
The Falkor is testing another ADCP on this cruise with a rating of 75 kH, which has an 800 meter range. The ADCP can measure how far away a particle is because the greater the distance the particle, the longer the reflected ping will take to return to the instrument. All of this is done with clever mathematical algorithms run on computers that collect the data from the ADCP once it comes back up. But for it all to work, the instrument must be calibrated – more on this soon.
